しかし,何をもって人間の仕組みを「理解した」と言えるのだろうか?(研究者によって答え方は様々かもしれないが・・・)例えば,1つの目標として,人間と「同じ仕組み」をロボットに移植して実際に機能させられる程度に理解しよう,と言われることがある.実際,人間の運動制御の研究の一部と,ヒューマノイドロボットの研究の一部との境界は曖昧になってきている([1][2]など).
当研究室で最近取り組んでいるテーマの1つに,体操選手の鉄棒運動の研究がある.鉄棒運動は,人間の運動制御の基礎研究でよく取り上げられる腕のリーチング運動(テーブルの上のコップに手を伸ばすときのような運動)に比べ,その制御が格段に難しいと言われる.ロボットの制御理論の研究でも鉄棒ロボットと一般的なマニピュレータ(腕ロボットとも見なせる)の制御が,同列に扱われることはほとんどない.鉄棒運動と腕のリーチング運動,制御の難しさという点では大きく異なるとも言えるこれらの運動を,人間の運動制御系は,それぞれどのような戦略で制御しているのだろうか?
当研究室では,体操選手が鉄棒で行う「け上がり」運動は,ある開始姿勢,経由姿勢,および終了姿勢とを繋ぐ最も「滑らか」な運動を計算するという最適化問題を解くことで,比較的よく再現できることを示している[3].実は,この「滑らかさ」は腕のリーチング運動にも見られることが広く知られた性質である.つまり,腕のリーチング運動と鉄棒でのけ上がり運動は,共通した特徴がありそうなのである.
一方,け上がり運動の説明には,単純な腕のリーチング運動の説明には必要のない「経由姿勢」まで指定しなければならない.解析の結果,体操選手の運動をよく再現するには,「ちょうど良い」タイミングで「ちょうど良い」姿勢を,経由姿勢として指定しなければならないこと が分かっている[3][4].我々は,経由姿勢のような「運動表現」が,実際に,体操選手の運動制御系(神経系)においても使われている可能性があると考えている.これは俗に言う運動の「コツ」のようなものに対応するのかもしれない.
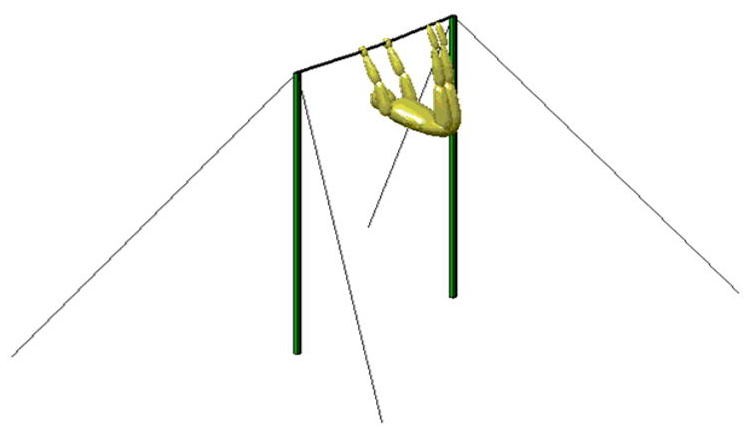

図1:け上がり運動の動力学モデルの構築
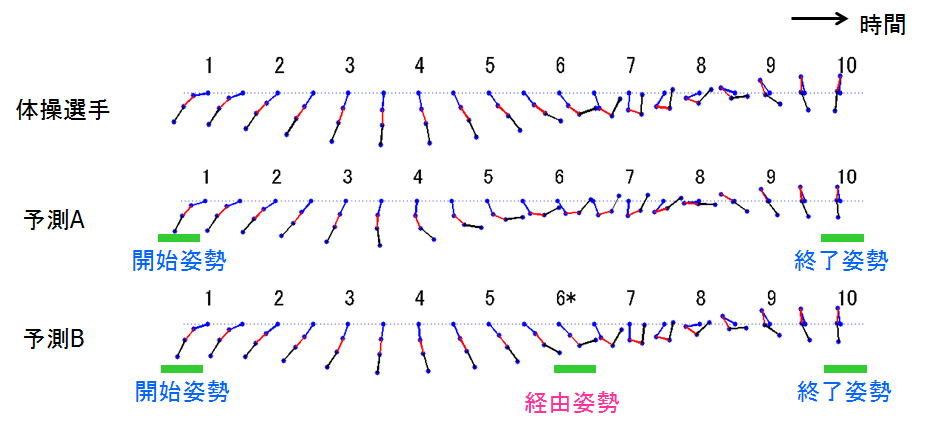
図2:滑らかさの規範(指令トルク変化最小)を用いた理論予測と計測データとの比較
予測Bでは経由姿勢を指定しているが,予測Aでは指定していない.
研究はまだまだ(常に)途上なのだが,雰囲気を感じていただけただろうか.
我々は,鉄棒運動に限らず人間の運動制御の仕組み全般について興味をもち研究している.例えば,既存の制御工学は,人間の運動の仕組みの理解にどのように貢献できるのか,あるいは逆に,人間の運動制御の仕組みから何かを学べるのかなどについても,具体的な答えをを少しでも積み上げてみたいと思っている.
参考文献
[1] 川人:脳の計算理論,産業図書 (1996)
[2] 土井ら(編):脳・身体性・ロボット -知能の創発を目指して-,シュプリンガー・フェアラーク東京 (2005)
[3] 山崎ら:非ホロノミック拘束下における到達運動としての鉄棒でのけ上がり運動の解析,システム制御情報学会論文誌,Vol. 20, No. 7, pp. 292-301 (2007)
[4] 竹内ら:消費エネルギーを考慮した規範に基づく鉄棒上でのけ上がり運動の解析,信学技報,NC2006-155, pp. 13-18 (2007)