日本語/English
Control of Multi-Agent Systems
 Multi-agent
systems are systems that agents cooperatively execute a given
task. The control techniques have various engineering
applications such as cooperative robotics, sensor networks,
and smart girds. Motivated by this fact, the following topic
is studied in our group.
Multi-agent
systems are systems that agents cooperatively execute a given
task. The control techniques have various engineering
applications such as cooperative robotics, sensor networks,
and smart girds. Motivated by this fact, the following topic
is studied in our group.
Robotic Mass Games by Distributed Control
The goal of this study is to find distributed controllers for the robotic mass games, that is, to let mobile robots organize themselves into a formation displaying a given grayscale image as shown in the following figure.
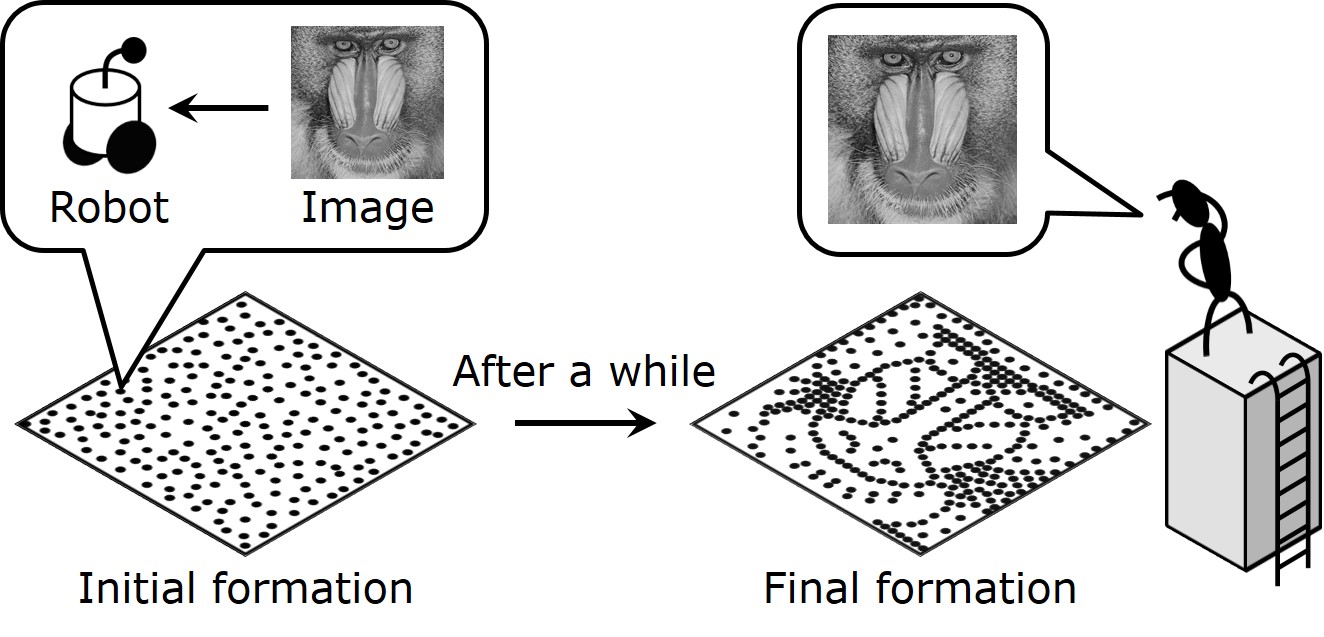
This topic has a wide range of applications, including entertainment, image processing, and display devices. For example, such a control technique can be used as a halftone image processing technique by regarding the robots, the given image, and the final formation as black pixels, an original image, and a processed image, respectively.
The following animation is a simulation result by the controllers developed in this study. What do you see?

The images given to the robots: Image 1 Image 2 Image 3 Image 4 Default